Steady-state problems
This notebook outlines the solution and differentiation of steady-state problems using bt_ocean. The key approach used is implicit differentiation. For further details on implicit differentiation see
Andreas Griewank and Andrea Walther, ‘Evaluating derivatives’, second edition, Society for Industrial and Applied Mathematics, 2008, ISBN: 978-0-898716-59-7, chapter 15
Bruce Christianson, ‘Reverse accumulation and attractive fixed points’, Optimization Methods and Software 3(4), pp. 311–326 1994, doi: https://doi.org/10.1080/10556789408805572
Zico Kolter, David Duvenaud, and Matt Johnson, ‘Deep implicit layers - neural ODEs, deep equilibirum models, and beyond’, https://implicit-layers-tutorial.org/ [accessed 2024-08-26], chapter 2
Forward problem
Here we consider a non-linear Stommel problem with a single gyre. We start by configuring the model.
[1]:
%matplotlib inline
from bt_ocean.model import CNAB2Solver
from bt_ocean.parameters import parameters, tau_0, rho_0, D
import jax
import jax.numpy as jnp
import matplotlib.pyplot as plt
from functools import partial
jax.config.update("jax_enable_x64", True)
n_hour = 2
parameters = dict(parameters)
parameters.update({"N_x": 64,
"N_y": 64,
"dt": 3600 / n_hour,
"r": 0.1 * parameters["beta"] * parameters["L_y"],
"nu": 0})
def Q(grid):
return -((tau_0 * jnp.pi / (D * rho_0 * 2 * grid.L_y))
* jnp.cos(jnp.pi * grid.Y / (2 * grid.L_y)))
model = CNAB2Solver(parameters)
model.fields["Q"] = Q(model.grid)
We now solve to steady-state. Rather than writing our own time loop we can use the steady_state_solve method. Under-the-hood this timesteps the model until an approximate steady-state is reached.
[2]:
model.steady_state_solve(tol=1.0e-5)
plt.figure()
plt.contourf(model.grid.X, model.grid.Y, D * model.fields["psi"] / 1.0e6, 64, cmap="magma")
plt.gca().set_aspect(1)
plt.colorbar()
print(f"{(D * model.fields['psi'] / 1.0e6).max()=}")
(D * model.fields['psi'] / 1.0e6).max()=Array(10.15279929, dtype=float64)
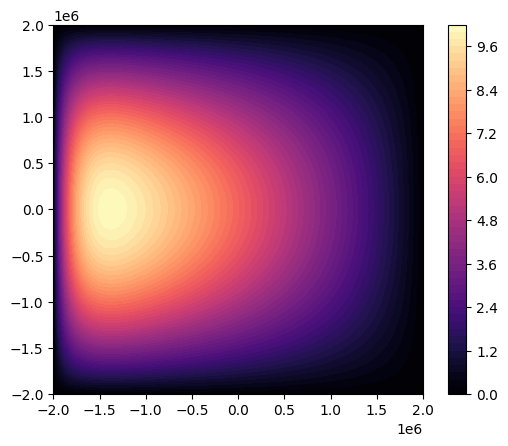
We see a classic Stommel gyre solution, with a transport of approximately \(10\) Sv.
Autodiff
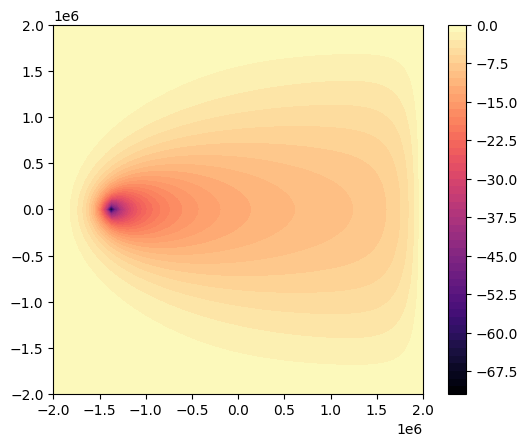
We now differentiate the transport with respect to the wind forcing profile \(Q\) appearing on the right-hand-side of the barotropic vorticity equation. We write a single function which computes the diagnostic. Under-the-hood this applies implicit differentiation, constructing a fixed-point iteration to solve an associated adjoint problem.
[3]:
def forward(Q):
model = CNAB2Solver(parameters)
model.fields["Q"] = Q
model.steady_state_solve(tol=1.0e-6)
return D * model.fields["psi"].max() / 1.0e6
transport, vjp = jax.vjp(forward, model.fields["Q"])
print(f"{transport=}")
dtransport_dual, = vjp(1.0)
dtransport_primal = dtransport_dual / model.grid.W
plt.figure()
plt.contourf(model.grid.X, model.grid.Y, dtransport_primal, 64, cmap="magma")
plt.gca().set_aspect(1)
plt.colorbar()
transport=Array(10.15350367, dtype=float64)
[3]:
<matplotlib.colorbar.Colorbar at 0x740f181a2690>
Let’s perform a simple check against finite differencing.
[4]:
eta = ((tau_0 * jnp.pi / (D * rho_0 * 2 * model.grid.L_y))
* jnp.sin(jnp.pi * (model.grid.X + model.grid.L_x) / (2 * model.grid.L_x))
* jnp.sin(jnp.pi * (model.grid.Y + model.grid.L_y) / (2 * model.grid.L_y)))
dtransport_dual_eta = jnp.tensordot(dtransport_dual, eta)
print(f"{dtransport_dual_eta=}")
eps = 1.0e-5
dtransport_dual_eta_fd = (forward(model.fields["Q"] + eps * eta) - forward(model.fields["Q"] - eps * eta)) / (2 * eps)
print(f"{dtransport_dual_eta_fd=}")
assert abs(dtransport_dual_eta - dtransport_dual_eta_fd) < 1.0e-3 * abs(dtransport_dual_eta_fd)
dtransport_dual_eta=Array(-7.43007841, dtype=float64)
dtransport_dual_eta_fd=Array(-7.43041908, dtype=float64)
Custom terms
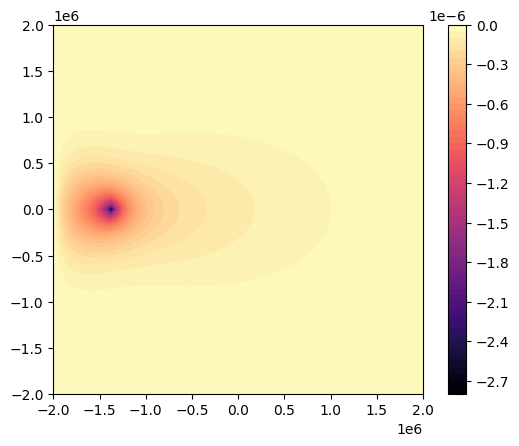
We can also add further terms, and differentiate with respect to extra parameters. Here we differentiate with respect to a perturbation to the bottom drag parameter.
[5]:
def forward(Q, r):
def update(model, r):
model.fields["Q"] = Q - (r - model.r) * model.fields["zeta"]
model = CNAB2Solver(parameters)
model.steady_state_solve(r, update=update, tol=1.0e-6)
return D * model.fields["psi"].max() / 1.0e6
r = jnp.full_like(model.fields["Q"], model.r)
transport, vjp = jax.vjp(partial(forward, model.fields["Q"]), r)
print(f"{transport=}")
dtransport_dual, = vjp(1.0)
dtransport_primal = dtransport_dual / model.grid.W
plt.figure()
plt.contourf(model.grid.X, model.grid.Y, dtransport_primal, 64, cmap="magma")
plt.gca().set_aspect(1)
plt.colorbar()
transport=Array(10.15350367, dtype=float64)
[5]:
<matplotlib.colorbar.Colorbar at 0x740efec36390>
We can again compare against the result from finite differencing.
[6]:
eta = (model.r
* jnp.sin(jnp.pi * (model.grid.X + model.grid.L_x) / (2 * model.grid.L_x))
* jnp.sin(jnp.pi * (model.grid.Y + model.grid.L_y) / (2 * model.grid.L_y)))
dtransport_dual_eta = jnp.tensordot(dtransport_dual, eta)
print(f"{dtransport_dual_eta=}")
eps = 1.0e-5
dtransport_dual_eta_fd = (forward(model.fields["Q"], r + eps * eta) - forward(model.fields["Q"], r - eps * eta)) / (2 * eps)
print(f"{dtransport_dual_eta_fd=}")
assert abs(dtransport_dual_eta - dtransport_dual_eta_fd) < 1.0e-3 * abs(dtransport_dual_eta_fd)
dtransport_dual_eta=Array(-2.11698943, dtype=float64)
dtransport_dual_eta_fd=Array(-2.11810811, dtype=float64)